2024 年 12 月 5 日
- 在風洞實驗中,德國太空中心研究了機器人和無人機監測空氣中氣體動態的各種方法。
- 研究的目的是收集受控環境中氣體擴散的數據,以便將新的機器學習方法與物理模型結合。
- 未來,自主機器人平台網路將定位危險氣體,預測其在大氣中的發展,從而支援緊急服務。
- 重點領域:安全、自主機器人、機器學習、感測器技術、救災
如果發生涉及危險物質的事故,準確了解危害健康的物質如何透過空氣傳播對於有效的災害管理至關重要。這種理解可能意味著生與死的區別,並幫助緊急應變人員快速回應並採取正確的行動。這就是德國航空航天中心 (DLR) 的 STARE(自主機器人探索集群技術)計畫的用武之地:透過使用自主機器人集群,正在開發用於定位和監測大氣中氣體的創新解決方案。最先進的機器學習方法(簡稱 ML)與物理模型相結合,使機器人和無人機能夠自主預測空氣中氣體的動態 - 未來將成群預測,以覆蓋盡可能大的範圍地區。繼2023年3月在低速風洞進行首次實驗後,STARE系列測試持續進行,並於2024年9月成功完成。
STARE 計畫以以其複雜的同步飛行模式而聞名的八哥鳥類命名,旨在開發新的基於機器學習的系統,用於自主環境探索。其核心理念是創建一個分散的機器人平台群,每個平台都配備感測器,使它們能夠檢測化學物質或其他材料在空氣中的擴散——無論是地面系統還是飛行中的無人機。透過合作和分享數據,他們可以共同追蹤大面積氣態物質的動態,為災難應變團隊提供關鍵資訊。
風洞實驗-不只是飛機研究
為了使這個願景成為現實,德國太空中心通訊與導航研究所的 STARE 團隊在荷蘭馬克內斯的 LST 低速風洞中進行了一系列實驗。風洞通常與測試飛機概念或其他空氣動力學研究相關。但事實證明,它們對於提高機器人偵測氣體的能力也非常有價值。 LST(低速風洞)是德國-荷蘭風洞的成員,與「傳統」風洞相比,它可以在非常低的風速下進行模型實驗。這些對於現實的、受控的測試環境是必要的,以便透過實驗研究氣流中氣體的行為及其擴散和濃度的動態。風洞中的受控雲在風力條件恆定的情況下是「準靜止」的,因此研究人員可以以與時間無關的方式檢查其傳播的動態。這一點很重要,這樣即使測量時間不同,不同位置的測量也可以相互關聯。
風洞實驗有幾個目標
-
受控條件可獲得可靠結果
透過調節風速,可精確研究氣體的行為。這些數據對於優化演算法至關重要。 -
模擬真實挑戰
在實踐中,救援人員會遇到濃煙、空氣湍流等複雜情況。風洞允許重新創建此類場景,並有助於相應地調整感測器和模型。 -
安全方面
使用風洞可以安全地進行模擬真實條件但不會造成任何危險的「遊戲氣體」實驗。 -
感測器技術比較
在相同條件下測試了不同的感測器,以評估其對不同應用的適用性。
在風洞中,科學家模擬了氣體在大氣中的傳播方式以及無人機周圍的湍流如何影響機上的感測器。研究結果預計將為新一代自主機器人探索危險環境並為救災提供即時數據奠定基礎。
STARE 的一項關鍵創新是將尖端機器學習技術與不同氣體如何在空氣中傳播的物理模型相結合。這種連接不僅應該使機器人能夠在一起工作時對環境進行預測。同時,目標是減少對大量訓練資料的需求,這些資料的收集通常既昂貴又耗時。他們應該以這樣的方式接受培訓,以便他們以後可以適應新環境,而無需大量額外的培訓數據。
機器人「看得」很好,但「聞」起來卻很困難。
當您想到自主機器人時,通常會想到未來機器或行星探索中的漫遊車。它們配備了先進的攝像頭,可以「觀察」、分析周圍環境並與周圍環境互動。例如,由於相機技術和人工智慧的進步,漫遊車可以非常獨立地探索火星。它們產生大量數據,輸入到演算法中,使機器人能夠即時學習和調整自己的行為。
與提供近距離和長距離高解析度即時數據的相機相比,非視覺感測器(例如那些應該「聞」空氣中的化學物質的感測器)經常面臨障礙。許多化學感測器僅提供來自其周圍環境的測量。此外,相較之下,這些感測器通常具有較慢的響應時間和較低的更新率。這些限制使得非視覺環境因素的自主探索成為一項重大挑戰。
風洞測試資料收集的高科技方法
除此之外,為了進行實驗,開發了一種創新的 3D 體積掃描儀,可以將感測器以毫米精度定位在空間的多個層面上。該掃描儀能夠以高空間解析度測量氣體雲。不同類型的感測器——包括金屬氧化物感測器(MOX)和所謂的光離子化探測器(PID)——被用來收集綜合數據。例如,建築物和工業設施的模型被放置在地面上,以研究障礙物周圍氣體的擴散和濃度特徵。研究結果為驗證氣體傳播的物理和理論模型提供了重要的資料庫。
在其中一項實驗中,掃描器從不同角度捕獲了從受控甲烷源逸出的雲,並使用雷射分析了各種掃描模式。即使只有少量的溫室氣體,它也可以透過特定的光吸收來測量甲烷濃度。
在另一系列實驗中,研究小組研究了無人機在檢測氣體及其在空氣中濃度方面的作用。無人機在危險環境中具有巨大的使用潛力,但其旋翼產生的下洗流(即所謂的下洗效應)會極大地影響測量。無人機配備了約 200 個用於測量風流和氣體檢測的感測器,被引導進入風洞的霧雲中。這測量了無人機上不同位置的氣體濃度和風型。透過分析數據,應該找到無人機的最佳感測器位置,從而確保在湍流中仍能進行可靠的測量。另一方面,後來的雄心勃勃的目標是開發基於大量數據的校正演算法,直接根據測量值計算無人機下洗效應造成的誤差。
另一項實驗致力於用雷射感測器檢測氣體洩漏。它也安裝在 3D 體積掃描儀上,與 MOX/PID 感測器單元和無人機不同,無需引導到雲端即可現場(即直接在現場)收集測量數據。雷射感測器從遠處檢測到從側面逸出的玩具氣體雲。他從不同角度掃描它們並分析不同的掃描模式。由於不同濃度的氣體具有特定的光吸收能力,因此可以透過雷射進行氣體濃縮,即使是少量的氣體,例如溫室氣體甲烷。
除了DLR 通訊與導航研究所外,DLR 不倫瑞克基地的飛行導引研究所也積極參與STARE 計畫:研究人員正在貢獻一個具體的應用範例,其中來自異構群的多架多旋翼飛行器將氣體源定位為在未知區域中盡可能有效率地進行。該研究所負責所用無人機的自主任務規劃,並在執行任務時重新規劃飛行路徑。
救災中自主機器人群的下一步
STARE 計畫收集的數據現在將被處理並提供給科學界,以推進環境監測和災害管理的研究。具體來說,STARE 的專業知識和數據將流入 DLR 專案 CLEANLIEST,其中多個機構正在共同研究未來氫經濟的測量概念,例如檢測洩漏。德國航太中心通訊與導航研究所以及技術物理與大氣物理研究所在此共享一個工作包。雖然 STARE 仍然使用商用偵測器,但來自 CLEANLIEST 技術物理學的團隊將開發特殊的雷射感測器。大氣物理學將致力於改進氣體擴散的電腦模式。通訊和導航團隊致力於在機器人平台上連接兩者:哪個機器人,配備哪些感測器,必須移動到哪裡?對於這些以及類似的高度複雜的問題,需要開發演算法來協調機器人之間的關係。在群體中,它們應該自主分析目前的測量值,並決定如何定位自己,以最佳方式捕捉動態變化的氫雲。
STARE 資訊也將繼續用於德國研究基金會 (DFG) 的 FlyMoGato 項目,該項目正在進一步開發使用雷射光譜檢測和測量氣體源的基於群的概念。雷射測量技術的進一步發展,可以從側面測量氫雲,而無需將感測器飛入雲中。
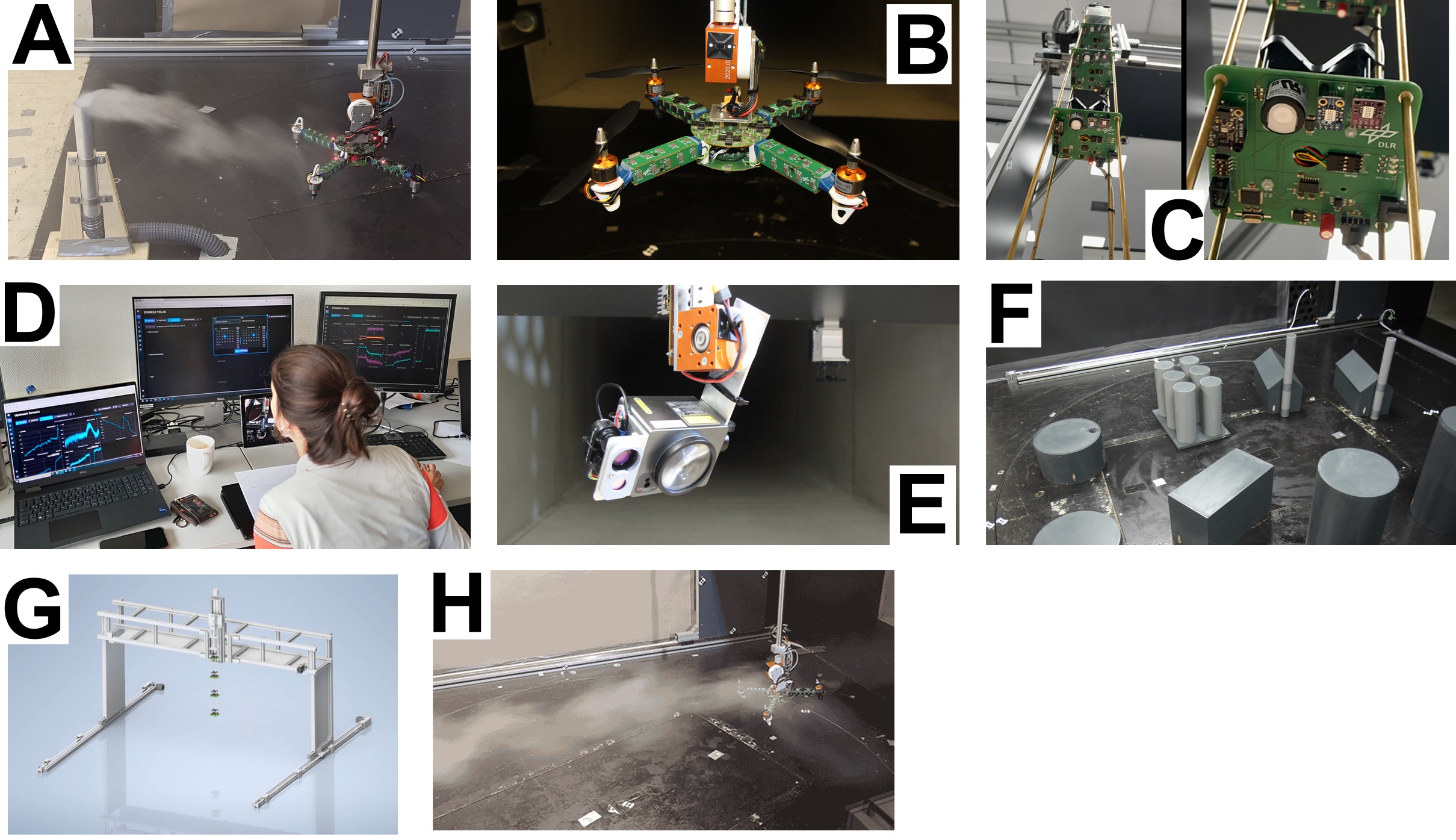
[照片]
(A) 測量無人機接近氣源
無人機的旋翼使周圍空氣旋轉,導致測量感測器無法捕捉正確的測量數據。在低速風洞的 STARE 實驗中,DLR 團隊研究了無人機表面的哪些位置比其他位置更合適等問題。稍後還將開發校正演算法,以便根據測量數據計算由下沉氣流(即所謂的下洗效應)引起的測量誤差。
(B) 實驗無人機,配備 200 個感測器的四軸飛行器
無人機連接到3D掃描儀,3D掃描儀引導無人機穿過三維空間風洞中的氣體雲。黑色感知器測量風速,灰色感知器偵測氣體。
(C) 氣體感測器陣列中的感測器單元,用於測量氣體濃度以及風向和風速
氣體感測器陣列連接到移動 3D 體積掃描儀,因此可以沿著三個軸在房間內移動。四層有一個感測器單元。每個都由風速計(超音波風感測器,位於電路板上方)以及溫度、濕度和氣體濃度感測器(電路板下方)組成。
(D) STARE風洞測量資料處理系統
感測器將低速風洞的測量數據透過WLAN即時發送到控制室。
(E) LST低速風洞中氣體雲的雷射測量
雖然氣體感測器陣列和無人機在原位進行測量,即必須穿透氣體雲,但基於雷射的測量和濃度測定可以從遠處橫向進行。
(F) “障礙賽”
各種物件可作為建築物和工業設施的微型模型。它們擋住了順風的霧雲,3D 體積掃描儀上的氣體感測器陣列捕獲雲,以表徵其在障礙物周圍的動態。
(G) 安裝氣體感測器陣列的 3D 體積掃描儀示意圖
3D 體積掃描儀引導中央安裝的具有四個感測器單元的感測器陣列穿過風洞中的氣體雲。它前後移動,將掃描器左右、上下移動三個等級。
(H) 測量無人機接近氣源
您可以在剪輯中清楚地看到無人機的旋翼如何使空氣旋轉 - 有時使測量感測器無法記錄正確的測量數據。在 STARE 風洞測試期間,DLR 研究團隊除其他外,還調查了無人機表面的哪些位置比其他位置更適合記錄氣體濃度和風力。稍後還將開發校正演算法,以便直接根據測量數據計算由下降氣流引起的測量誤差。